Neuromorphic Computing (NC) and Spiking Neural Networks (SNNs) in particular are often viewed as the next generation of Neural Networks (NNs). NC is a novel bio-inspired paradigm for energy efficient neural computation, often relying on SNNs in which neurons communicate via spikes in a sparse, event-based manner. This communication via spikes can be exploited by neuromorphic hardware implementations very effectively and results in a drastic reductions of power consumption and latency in contrast to regular GPU-based NNs. In recent years, neuromorphic hardware has become more accessible, and the support of learning frameworks has improved. However, available hardware is partially still experimental, and it is not transparent what these solutions are effectively capable of, how they integrate into real-world robotics applications, and how they realistically benefit energy efficiency and latency. In this work, we provide the robotics research community with an overview of what is possible with SNNs on neuromorphic hardware focusing on real-time processing. We introduce a benchmark of three popular neuromorphic hardware devices for the task of event-based object detection. Moreover, we show that an SNN on a neuromorphic hardware is able to run in a challenging table tennis robot setup in real-time.
@inproceedings{Ziegler2025icra,
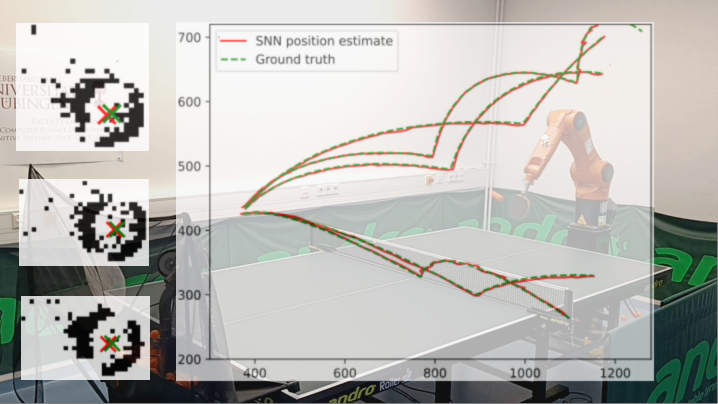
title={Detection of Fast-Moving Objects with Neuromorphic Hardware},
url = {https://arxiv.org/pdf/2403.10677},
author={Ziegler, Andreas and Vetter, Karl and Gossard, Thomas and Tebbe, Jonas and Otte, Sebastian and Zell, Andreas},
booktitle = {2025 {International} {Conference} on {Robotics} and {Automation} ({ICRA})},
publisher = {IEEE},
year={2025},
}This research was partially funded by Sony AI.